
0. I2C란??
I2C 관련 내용은 이전에 정리한 포스팅 참고.
[I2C] I2C 통신이란??
1. Raspberry Pi I2C 기능 활성화
라즈베리파이에서 Command 창을 킨 후
$ sudo raspi-config 명령어 입력
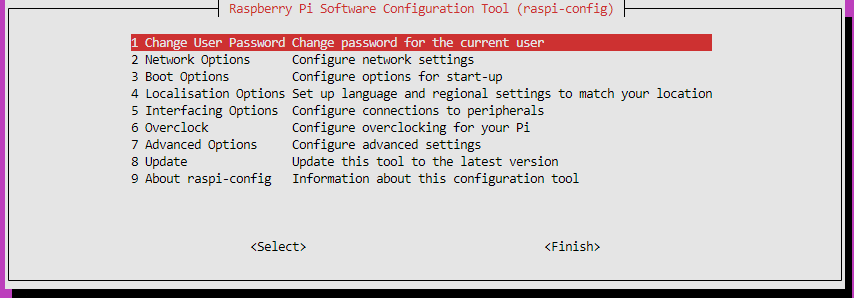
입력하면 이러한 창이 뜨게 되는데 여기에서 화살표로 5 Interfacing Options로 이동 후 Enter
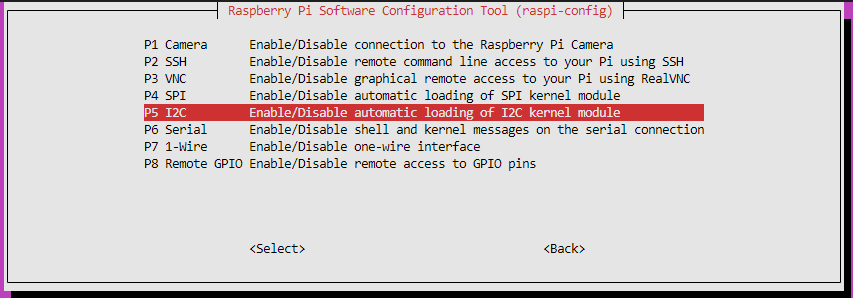
이러한 창이 뜨면 다시 5번째의 I2C로 이동 후 Enter
ARM I2C interface를 활성화 할거냐는 창이 뜨게 되는데 Yes선택 후 Enter
이제 화살표 오른쪽을 눌러서 Finish를 통해 설정창을 종료한다.
2. i2c-tools 설치
터미널에서 연결된 센서의 정보를 확인하기위해 i2c-tools 설치
1
2
$ sudo apt-get update
$ sudo apt-get install i2c-tools
3. 계정 권한부여
사용 계정에 i2c에 접근할 수 있는 권한을 부여해야 한다. (굳이 진행하지 않아도 되는것 같지만 하는 것이 좋아보인다.)
$ sudo adduser <계정명> i2c
이제 설정이 끝났으므로 라즈베리파이를 재부팅 한다.
$ sudo reboot now
4. i2c모듈, 드라이버 활성화 확인
lsmod 명령어를 통해 라즈베리파이에 설치된 모듈을을 모두 확인할 수 있다. i2c만 확인하기 위해서 grep을 활용한다.
$ lsmod | grep i2c

이런 식으로 출력되는 경우 정상적으로 설정된 것이다.
i2c 관련 드라이버도 생성되었는지 확인해보자.
$ ls -l /dev/*i2c*

정상적으로 존재하는 것을 확인할 수 있다.
💡 리눅스에서는 장치도 모두 파일로 다루어지며 그 파일들은 /dev/ 폴더에 있다.
이제 BNO055 모듈을 사용하기 위한 작업을 해야한다.
5. BNO055 필요 라이브러리 설치
라즈베리파이에서 BNO055 모듈을 사용하기 위해서는
1
pip3 install adafruit-circuitpython-bno055
로 설치가 필요한데 이 과정에서 SyntaxError: future feature annotations is not defined 에러가 발생했다. 따라서 이를 해결하기 위해 Python3의 버전을 바꿔주었는데 관련 내용은 이전 포스팅을 참고하기 바란다.
이제 라즈베리파이와 BNO055 모듈을 선으로 연결해 주어야 한다.
6. Raspberry Pi와 모듈 선으로 연결
필자의 경우 브래드보드를 사용해 연결해 주었다. 연결하는 방법은 어렵지 않다. 아래의 pinmap을 참고해서
3.3V는 VIN, GND 는 GND, SCL은 SCL, SDA는 SDA에 연결해주면 된다. (당연한 말이네…🤔)
Raspberry Pi4 Pin map
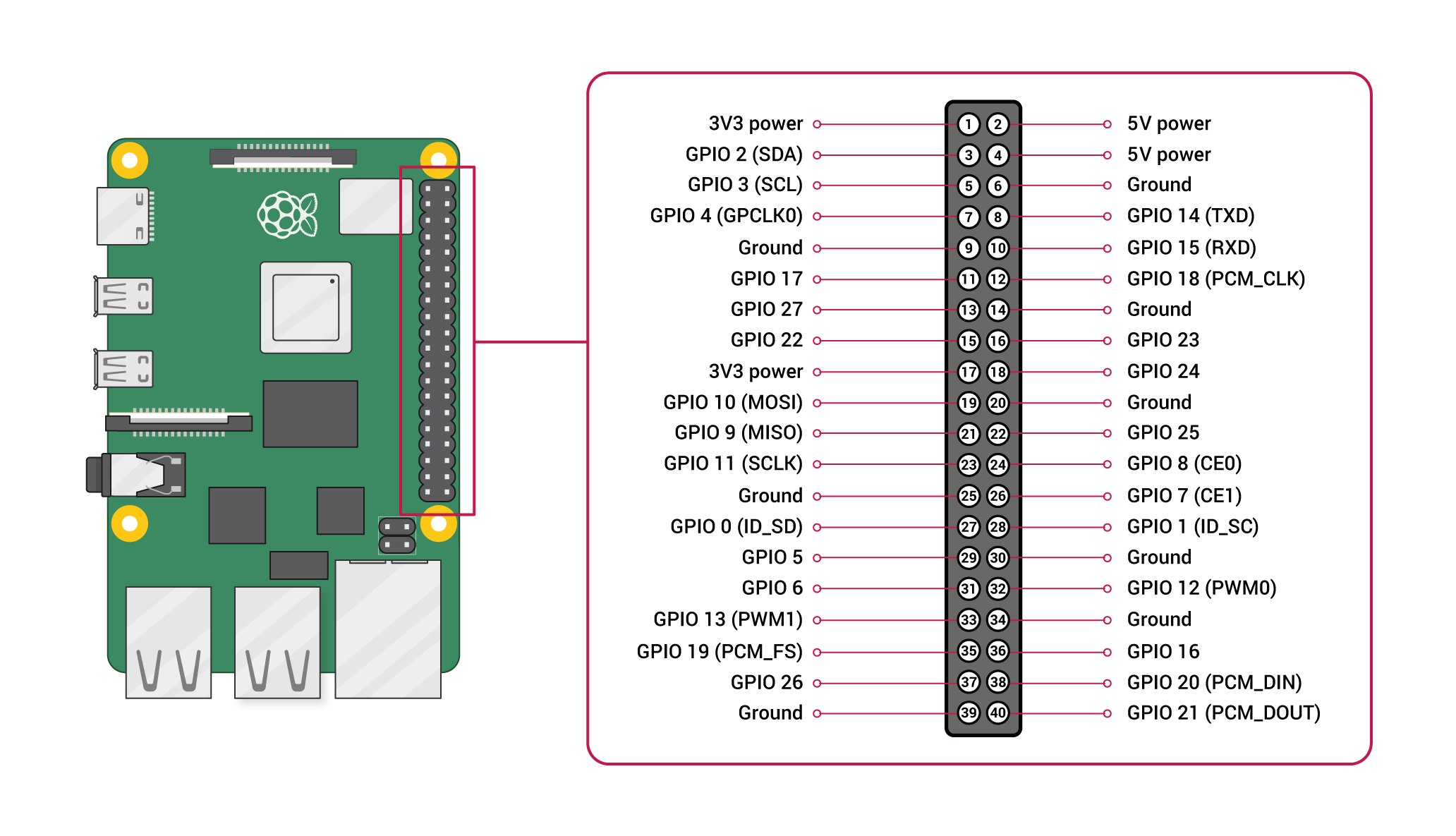 Raspberry Pi Pinmap [출처: Raspberry Pi Documentation]
Raspberry Pi Pinmap [출처: Raspberry Pi Documentation]
❕ Pinmap에서 처음에는 4, 6번 핀에 팬이 꽃혀있기도 했고 비슷한 위치에 선을 모으기 위해 (17, 20에 VIN, GND 연결) 27, 28번 핀에 SDA, SCL핀을 연결했었는데 계속 장치를 인식을 못해서 3, 5번 핀에 연결하니 정상적으로 인식했다. 27, 28도 I2C의 일종이나 다른 기능이 있는 것 같다…
연결된 장치 확인
전에 설치해둔 i2c-tools를 활용해 라즈베리파이와 연결된 i2c 장치를 확인해보자.
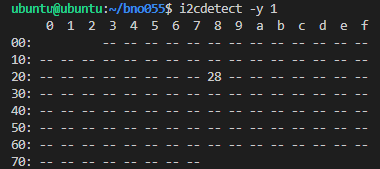
$ i2cdetect -y 1
 연결된 장치 확인
연결된 장치 확인
정상적으로 연결된 경우 위 사진 처럼 해당 칸에 16진수 형식으로 주소가 표시된다.
사진의 경우 “0x28” 이라는 것을 알 수 있다.
테스트 코드 작성
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
import board
import adafruit_bno055
import time
i2c = board.I2C() # uses board.SCL and board.SDA
sensor = adafruit_bno055.BNO055_I2C(i2c)
# sensor.mode = adafruit_bno055.M4G_MODE
while True:
print('Temperature: {} degrees C'.format(sensor.temperature))
print('Accelerometer (m/s^2): {}'.format(sensor.acceleration))
print('Magnetometer (microteslas): {}'.format(sensor.magnetic))
print('Gyroscope (deg/sec): {}'.format(sensor.gyro))
print('Euler angle: {}'.format(sensor.euler))
print('Quaternion: {}'.format(sensor.quaternion))
print('Linear acceleration (m/s^2): {}'.format(sensor.linear_acceleration))
print('Gravity (m/s^2): {}'.format(sensor.gravity))
print('Sensor mode : {}'.format(sensor.mode))
print(type(sensor.quaternion))
print()
time.sleep(1)
출력값
Temperature: 28 degrees C Accelerometer (m/s^2): (-0.11, -0.86, 9.41) Magnetometer (microteslas): (1.0625, -1.0625, 0.0) Gyroscope (deg/sec): (0.0, 0.0, 0.0) Euler angle: (359.9375, -0.625, 5.1875) Quaternion: (0.99896240234375, -0.04571533203125, 0.00592041015625, 0.0) Linear acceleration (m/s^2): (0.0, 0.02, -0.35000000000000003) Gravity (m/s^2): (-0.11, -0.89, 9.76) Sensor mode : 12
위와 같이 간단하게 IMU 신호를 잘 받는지 테스트 하기 위한 코드를 만들 수 있다. 7번행에 주석처리한 sensor mode의 경우 뒤의 M4G_MODE를 바꿔서 자신이 활용하고 싶은 모드로 변경이 가능하다. Default값은 NDOF 모드이며 다른 모드들의 경우 아래와 같다.
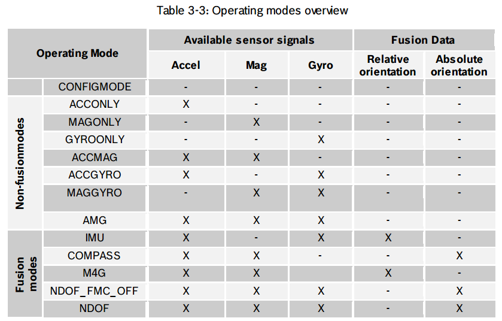 BNO055 지원 모드 (X : On, - : Off)
BNO055 지원 모드 (X : On, - : Off)
보다 더 자세한 내용은 Datasheet의 3.3을 참고하길 바란다.
참고자료
Github - Acafruit_CircuitPython_BNO055
Adafruit BNO055 Library - API 라즈베리파이 I2C 사용방법
라즈베리파이 mpu6050 가속도 센서 제어하는 방법